Falcon 9 made a thundering blastoff from Space Launch Complex 40 at Cape Canaveral Air Force Station at 20:10:41 UTC on Tuesday, lofting the Dragon SpX-6 spacecraft into orbit for SpaceX’s sixth operational cargo mission to the International Space Station. Rising with a total thrust of 600,000 Kilogram-force, Falcon quickly ascended and picked up speed, passing Mach 1 just 70 seconds into the flight when the vehicle had aligned itself with its north-easterly flight path, departing Florida’s Space Coast.
The first stage operated for two minutes and 38 seconds. Shutting down its engines, the stage made a clean separation from Falcon’s upper stage that headed on towards orbit, releasing the Dragon spacecraft into its intended trajectory ten minutes and 11 seconds after launch. By then, all the action involving the first stage had already been over and the majority of the stage was on its way to the bottom of the Ocean.
With the second stage heading off into orbit, the first stage booster embarked on its ambitious return. This was the seventh attempt to either soft land a stage in the ocean or return it to the Autonomous Spaceport Drone Ship, it was the third attempted drone ship landing.
The first attempt, on the SpX-5 mission in January, ended in a spectacular crash landing of the booster on the platform after running out of hydraulic fluid in its grid-fin system thus partly using its control authority during final descent. The second try achieved a soft splashdown in the ocean after the ASDS had to be moved out of the way due to extreme sea conditions. However, both of these return attempts showed that the booster could find its way back to the Drone Ship that – in the vastness of the Atlantic – looks extremely tiny when trying to aim for it from 80 Kilometers up.
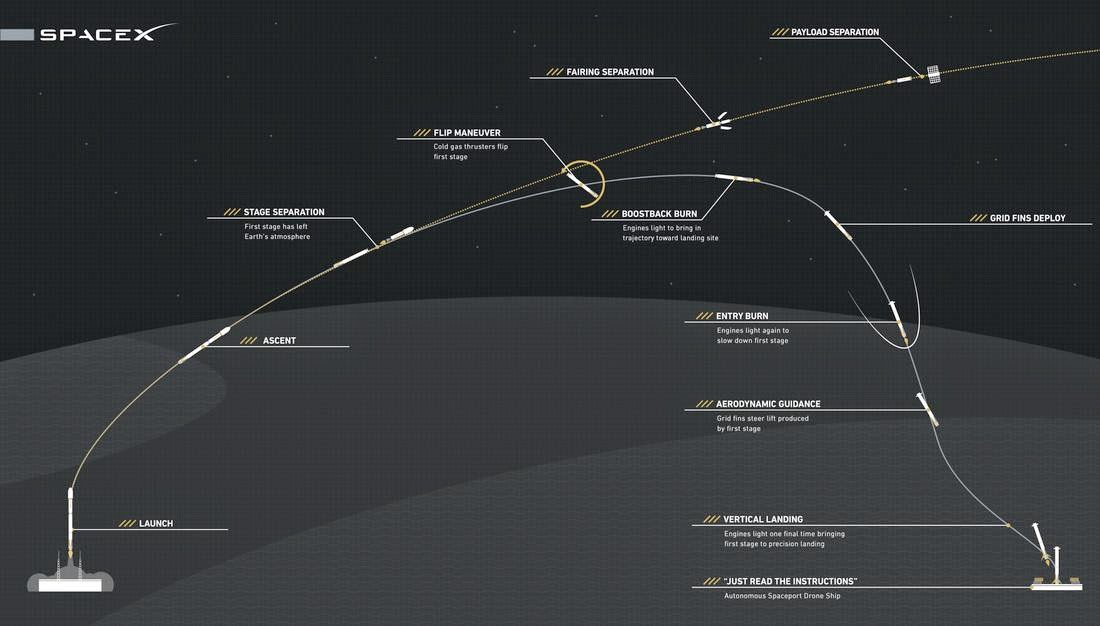
Equipped with Nitrogen cold gas thrusters, four aerodynamic grid fins and four deployable landing legs, the 43-meter long first stage started out on its journey immediately after stage separation – firing its thrusters to maneuver out of the exhaust of the second stage and re-orient to an engines-forward posture for the first of three propulsive maneuvers – starting out at an altitude of close to 80 Kilometers and a speed of over 2 Kilometers per second at separation.
Real-time call-outs made by the Launch Control Team confirmed that the booster successfully ignited three of its Merlin 1D engines at around T+4 minutes & 30 seconds – each delivering up to 66,700 Kilogram-force of thrust. This retrograde boost-back burn aimed to reduce the downrange travel distance of the first stage by about 50%, compared with a fully ballistic path not including any maneuvers after separation. The boost back burn also modified the exospheric trajectory of the stage, pushing the apogee below 125 Kilometers.
After 30 seconds, the booster shut down its engines again and entered a short ballistic segment, controlling its orientation with the Nitrogen thrusters installed near the interstage in the upper portion of the stage.

Approaching the dense atmosphere, Falcon 9 deployed its four hydraulic grid fins, also located in the interstage section, capable of individually rotating and tilting to provide a great deal of control once entering the discernible atmosphere. The addition of the grid fins improved the landing accuracy of the Falcon 9 from a few kilometers to a few meters, illustrating their importance in the atmospheric segment of flight when the engines are not firing.
With the fins deploying at T+6 minutes and 30 seconds, the booster was already close to the atmosphere, passing 70 Kilometers in altitude at around T+6:45 – coinciding with the ignition of three M1D engines for the ~17-second Re-Entry Burn. This Supersonic Retropropulsion Burn served two purposes, it began the process of slowing the booster from 1,200m/s and it also protected the engine compartment from the most turbulent region of the re-entry environment. Despite using shielding material in the engine compartment, the re-entry burn is needed to guarantee the intact survival of main propulsion system components for a safe re-use.
Once in the dense atmosphere, the booster transitioned control to the four grid fins with the thrusters complementing the fins whenever needed, particularly for roll control. The four fins can be individually controlled in a two-degree of freedom type design, allowing for complex guidance and control during atmospheric flight.
Heading into the atmosphere, the booster was kept in a stable posture by its low center of mass with the heavy engines in the aft and the nearly empty propellant tanks atop. The grid fins were to provide attitude control, constantly adjusting the pitch trim of the booster to control its along-track travel distance as the stage homed in on the 91 by 52-meter drone ship that precisely held its assigned position by processing GPS data and using its four diesel-powered azimuth thrusters.
Grid Fins & Landing Legs


At T+7 minutes and 47 seconds, it was reported that the first stage had again passed the sound barrier, just the other way around, transitioning from supersonic to subsonic speeds. Just after passing the T+8 minute mark, the first stage ignited its Center Engine to begin the final phase leading up to landing.
The call of ‘Landing Burn Start’ was the final event confirmed through Stage 1 Telemetry as the booster went below the horizon as seen from tracking stations at Cape Canaveral. Ten seconds prior to touchdown, the four landing legs were deployed using pressurized Helium to extend the legs to their deployed position. Landing was planned to occur at a speed of less than 6m/s under the power of the center engine creating a thrust to weight ratio greater than one. Touchdown on the platform had to be perfect, a non-vertical, partial or off-target landing would result in the stage tipping over, falling into the ocean or another undesired outcome.
In one of the NASA Management Rooms, a live feed of low frame-rate video from the ASDS could be seen, showing the first stage coming in to land, but not sticking the landing for some reason.
Using imagery from the ship for a quick analysis of the situation, SpaceX CEO and Chief Designer Elon Musk came to the conclusion that “excess lateral velocity caused it [the booster] to tip over post landing.” Musk’s Tweet was accompanied by two still frames, the first showing the booster with its deployed landing legs and running engine just a few meters above the bullseye target on the deck of the ASDS, the second showing smoke, fire and the stage at an angle, in the process of tipping over.
A few hours after the failed landing attempt, SpaceX posted a short video clip from an airborne drone or hexacopter that flew at some distance to the Drone Ship and recorded the final spectacular seconds of the flight.
The video shows the first stage incoming in a nearly perfectly vertical posture, but descending with a horizontal velocity component that would have likely caused it to overshoot the landing platform. Moments later, gimbaling action on the center engine begins to correct to flight path. At this stage of flight, with the stage at relatively low speed and the engine running, gimbaling of said engine provides the majority of control with the grid fins and thrusters assisting as needed in pitch and yaw control – they are still in charge of roll control.
 |
| Image: Spaceflight101/SpaceX |
 |
| Photo: SpaceX/Elon Musk |
 |
| Photo SpaceX/Elon Musk |
What caused the disturbance that led the stage to drift on a trajectory overshooting the ASDS is not precisely known – possible reasons can include the stage being delivered off target to the landing burn ignition point, a systems malfunction in the last seconds of flight or an external factor such as wind followed by an over-correction of the stage.
Elon Musk later Tweeted that "the issue was stiction in the biprop throttle valve, resulting in control system phase lag." This indicates that the Center Engine was not fast enough in completing what was asked from it by the control system in the critical last seconds of the descent.
It has to be noted that the entire return sequence of the first stage leaves only very little margin for correction. Overall, the sequence from stage separation to landing uses up approximately 10% of the booster’s total propellant load with only two or three seconds of margin, underlining that events of the landing sequence must occur very close to the prediction, providing only very little margin to account for external factors such as wind disturbance.
 |
| Photo: SpaceX |
SpaceX engineers will be able to retrieve a complete set of telemetry from the stage - from liftoff through the seconds after making contact with the ASDS to piece together the precise inputs of the Guidance System and the outputs of the various actuators (thrusters, fins & engines) to identify any weaknesses, also pulling weather sensor data from the ASDS to look whether an unfortunate gust of wind was responsible.
SpaceX certainly has their work cut out for them, looking at the task of refining the terminal landing algorithm and ensuring the potential throttle valve condition will not occur again. This landing attempt provided them with plenty of data that will be applied to solving the issues seen on Tuesday and increase the odds of achieving a successful landing on the Autonomous Spaceport Drone Ship in June on the Dragon SpX-7 mission.
Falcon 9 may also be looking forward to its first return to a land-based pad in July on the Jason-3 mission out of Vandenberg where construction of the landing pad at Space Launch Complex 4W has made progress over the past months.
The Autonomous Spaceport Drone Ship will return to the Port of Jacksonville in the coming days and bring home any components of Falcon 9 that may have ended up on deck.
No comments:
Post a Comment